Arduinoを始めよう!(2)モーター制御編
2013年2月28日(木)

回路
前回で登場したブレッドボードを使って、次の回路を組みます。
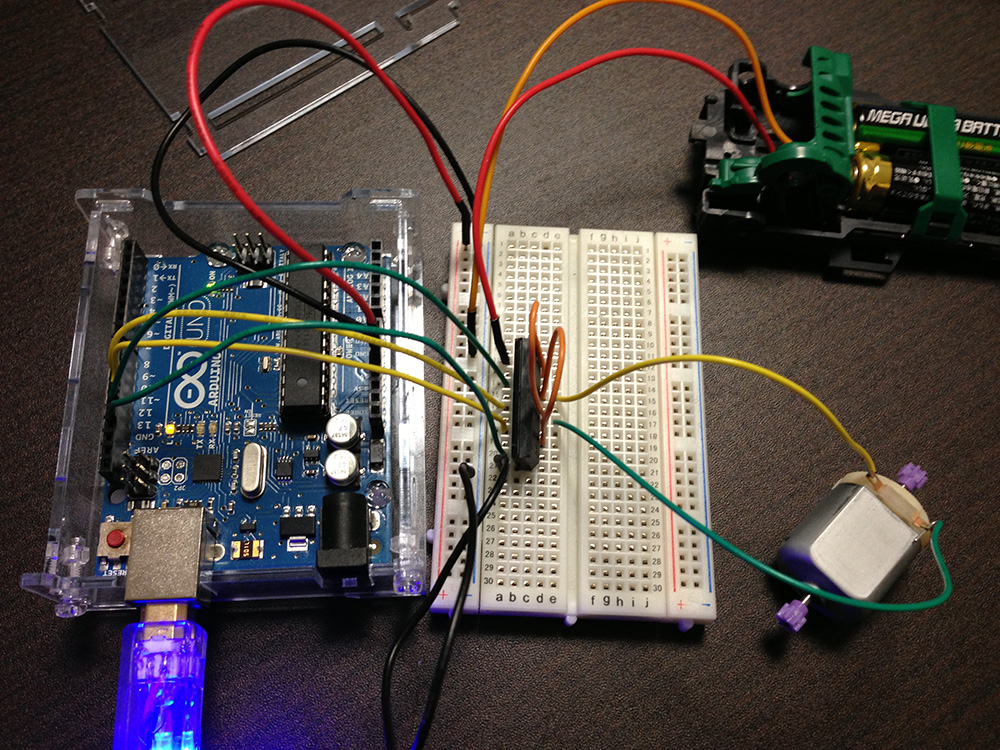
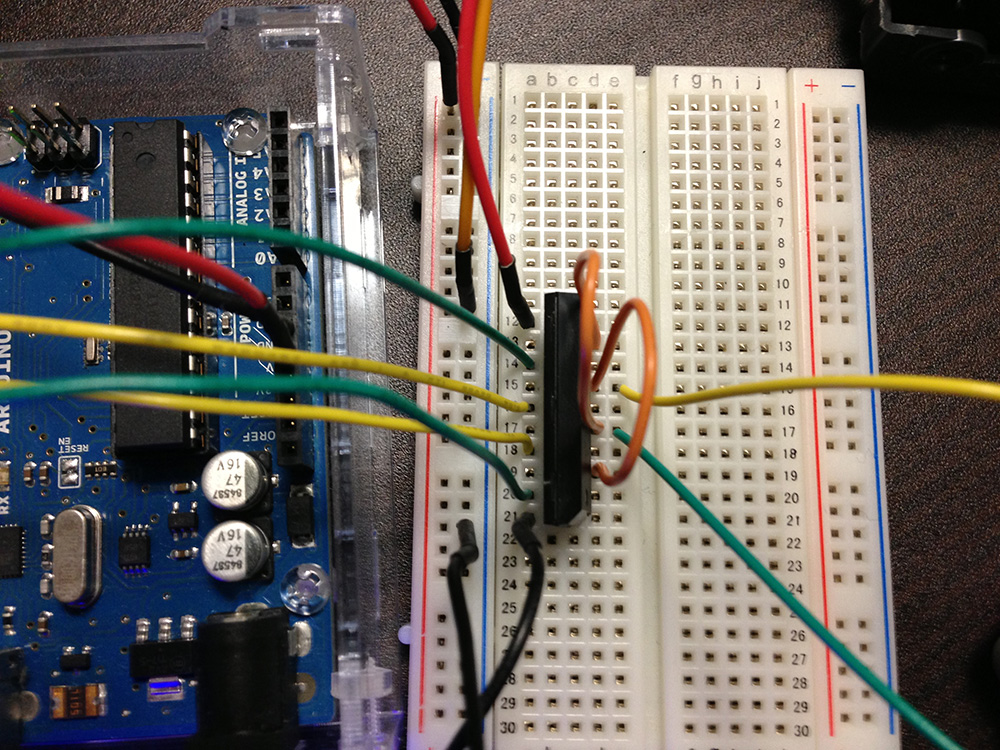
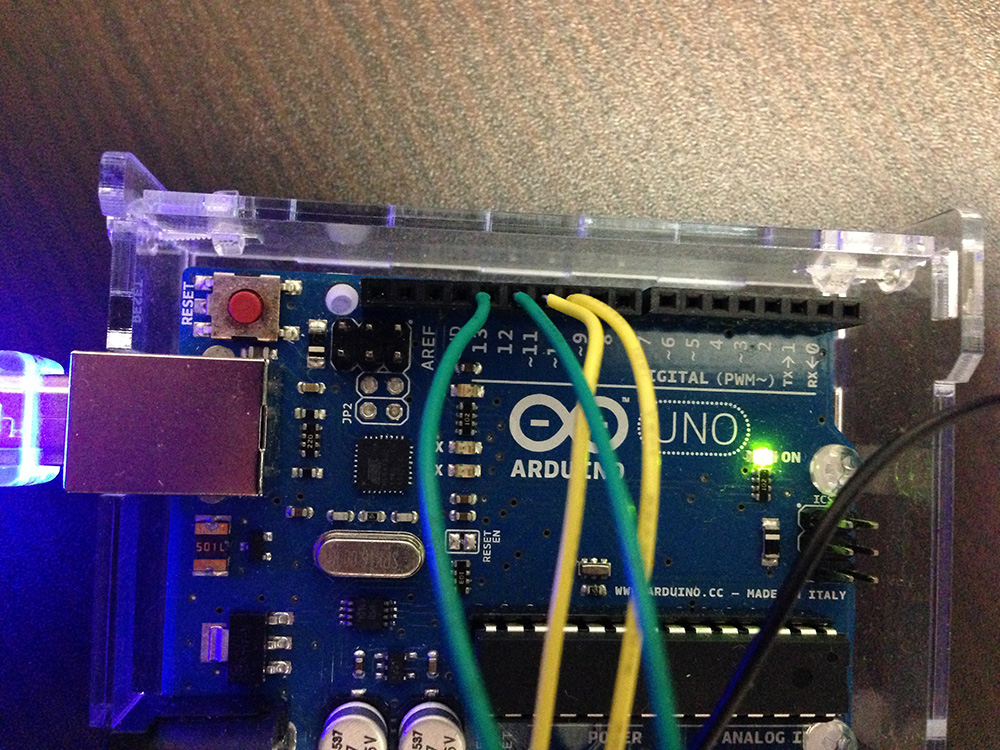
ブレッドボードとArduinoを使って実際に回路を組んだところ(クリックで拡大)
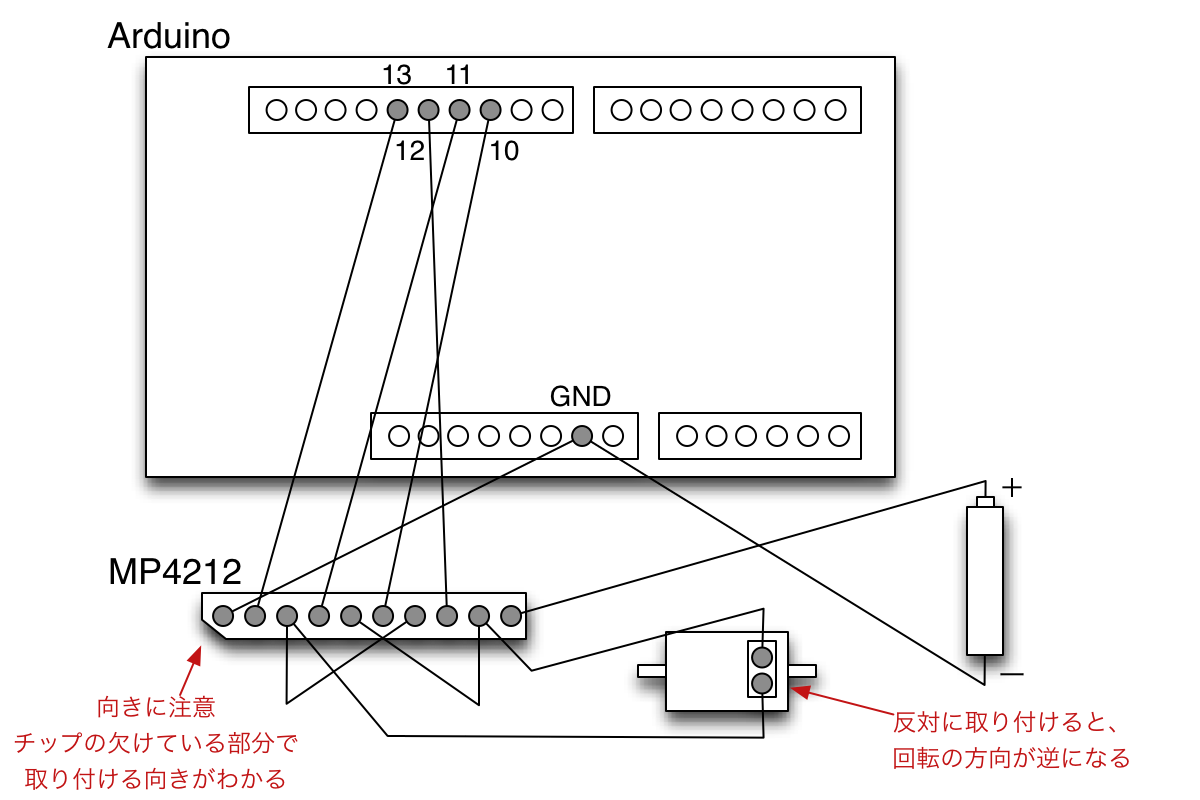
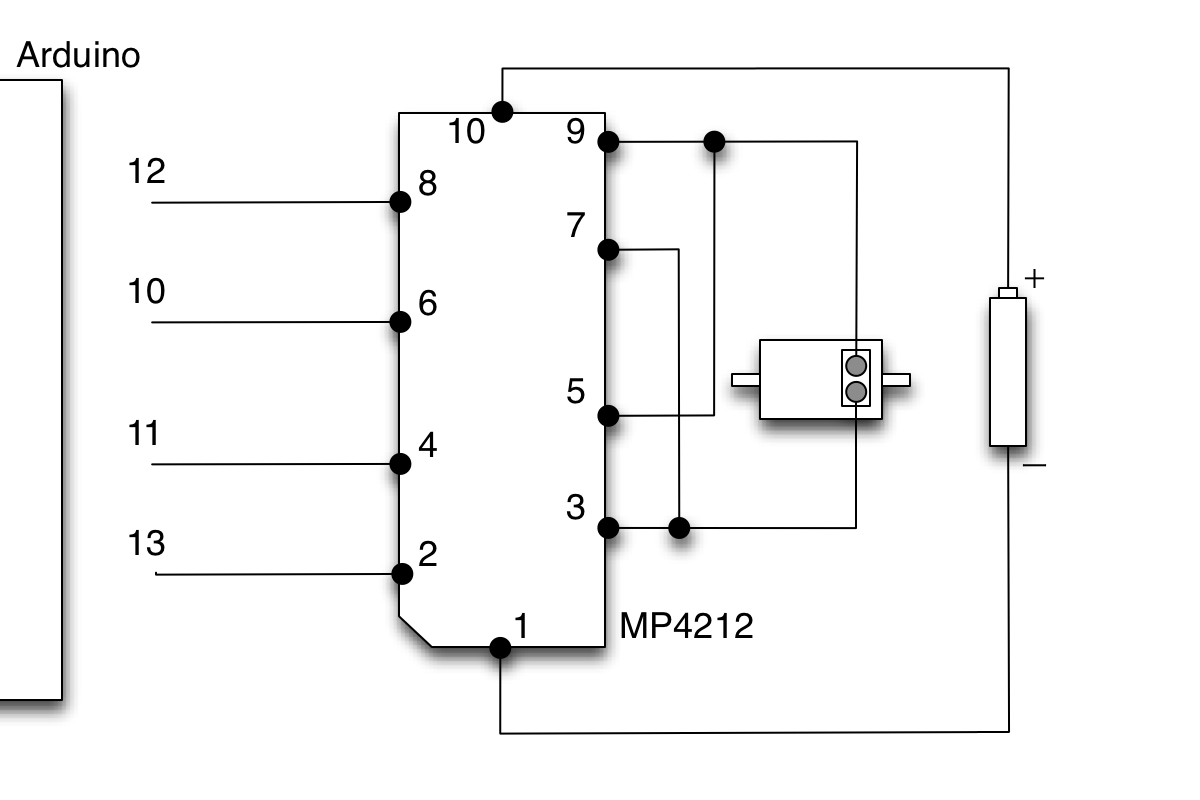
回路図(クリックで拡大)
これがArduinoを使ったモーターの制御回路です。モーターの回転方向を制御する“Hブリッジ回路”は自分で組むこともできますが、この連載の目的はミニ四駆の制御なので、少し楽をしてFETモジュールというものを使うことにします(Hブリッジ回路とFETモジュールについては後述します)。
モーターと回路の接続はクリップを使うと良いのですが、ここでは導線を直接、繋いでいます。この方法だと接触が悪く、モーターが動かない場合がありますので、その場合は、はじめにモーターと導線の接続を確認してください。
- [注意] FETモジュールとArduinoの接続に注意してください。これを間違えると、FETモジュールが壊れる可能性があります。
プログラム
回路が出来たら、次のプログラムをArduinoに転送します。
void signal1(int value) {
switch (value) {
case 0:
digitalWrite(12, HIGH);
digitalWrite(13, LOW);
break;
case 1:
digitalWrite(12, LOW);
digitalWrite(13, HIGH);
break;
}
}
void signal2(int value) {
switch (value) {
case 0:
digitalWrite(10, HIGH);
digitalWrite(11, LOW);
break;
case 1:
digitalWrite(10, LOW);
digitalWrite(11, HIGH);
break;
}
}
void forward() {
signal1(1);
signal2(0);
}
void back() {
signal1(0);
signal2(1);
}
void setup() {
pinMode(10, OUTPUT);
pinMode(11, OUTPUT);
pinMode(12, OUTPUT);
pinMode(13, OUTPUT);
}
void loop() {
forward();
delay(1000);
back();
delay(1000);
}
これでDCモーターの制御プログラムの完成です。
- [注意1] signal1()とsignal2()の出力ピン番号とLOWとHIGHの組み合わせをしっかりと確認してください。これを間違えると、FETモジュールが壊れる可能性があります。
- [注意2] プログラムを転送するまで、電池ボックスのスイッチは切っておいてください。
動作確認
それでは動作確認してみましょう。電池ボックスのスイッチをオフにしてから、プログラムを転送します。プログラムの転送が完了したら、電池ボックスのスイッチを入れます。そうすると、1秒おきにモーターが正転と逆転を繰り返します。
このように、モーターが正転と逆転を繰り返し続ければ、プログラムは正常に動いています。もし、動かない場合、ArduinoとFETモジュールの接続を確認してください。また、同様にモーターと回路の接続も確認してください。


連載バックナンバー



Think ITメルマガ会員登録受付中
Think ITでは、技術情報が詰まったメールマガジン「Think IT Weekly」の配信サービスを提供しています。メルマガ会員登録を済ませれば、メルマガだけでなく、さまざまな限定特典を入手できるようになります。