GrafanaCON 2025、太陽光発電による完全自走式ボートで世界一周を目指すプロジェクトのオブザーバビリティを紹介
GrafanaCON 2025から、衛星を開発するエンジニアが趣味で始めた太陽光発電で世界一周を目指す無人自動運転ボートのオブザーバビリティを解説するセッションを紹介する。プレゼンテーションを行ったのはVarda SpaceのR&Dチームのトップ、Andrew McCalip氏だ。セッションの動画は以下から参照できる。
●動画:Docker、Grafana、Starlinkを活用した自律航行船が世界一周を計画:Project Bob
無人の自走式ボートで世界一周をするのがProject Bob
このセッションのタイトル、「Circumnavigation or Bust:the OSS data stack powering a drone ship's journey around the world」は「OSSのデータスタックを搭載した自走式のボートで世界一周が可能なのか、それとも失敗するのか?」というやや自虐的な内容になっているが、それはMcCalip氏が100%趣味の範囲で行っていることに由来するのだろう。McCalip氏の本来の仕事は、無重力の状態でライフサイエンス関連の実験を行うための衛星を打ち上げる企業Varda Space IndustriesのR&Dチームの責任者というもので、無人の衛星の打ち上げという仕事に似てはいるものの、ボートで世界一周をするというプロジェクトとは性格がかなり異なると言える。
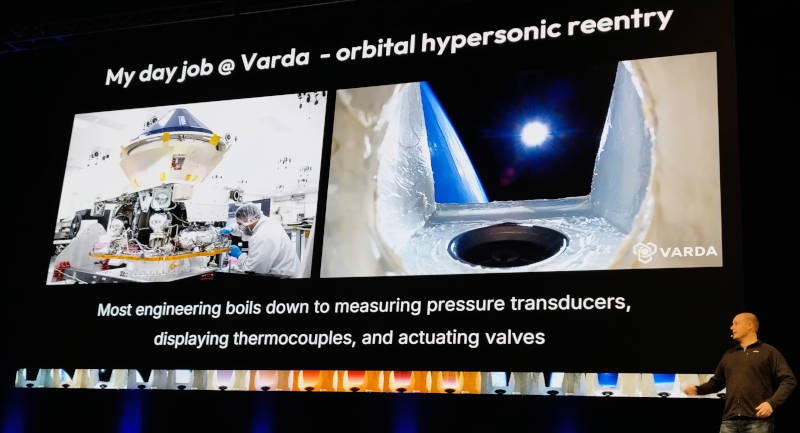
自身の本来の仕事を解説するMcCalip氏
Project Bobの概要についてMcCalip氏は、Grafana Labs以外にもRaspberry PiやStarlinkなどの企業の協力を得てこのプロジェクトを実行していることを説明。
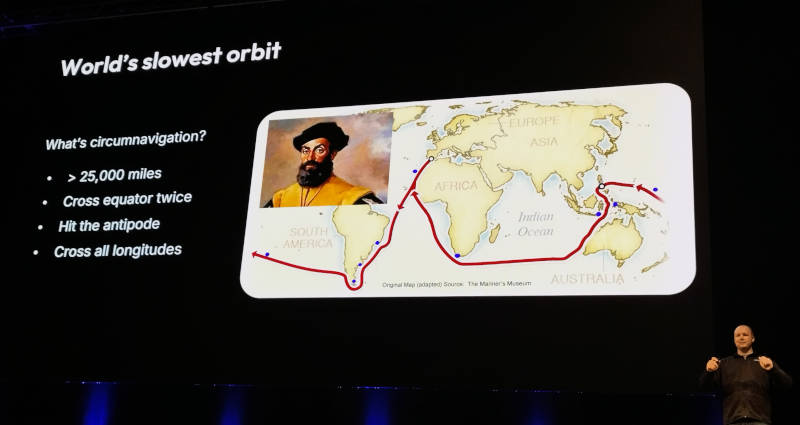
地球一周の概要を解説
ここではProject Bobは4万キロ以上の航行距離、赤道を2回通過することなどを説明。世界一周をゆっくりとした速度で行うことになると説明した。アメリカの西海岸を出発して太平洋を渡り、フィリピンを経由し、ジャワ島の東を回遊したうえで喜望峰を超えてアフリカ大陸西岸を北上、ポルトガルを経て南下し、南米大陸のブラジル、ウルグアイ、アルゼンチンの東岸を経てニュージーランドの北部を回るというマゼランが世界一周を行ったルートを例に挙げて世界一周を説明。マゼランは1500年代に約3年を掛けて世界一周を行ったと歴史には残っているが、Project Bobは太陽光発電による自走式ボートということで、それよりはかなり少ない時間で完走することになるのではないだろうか。
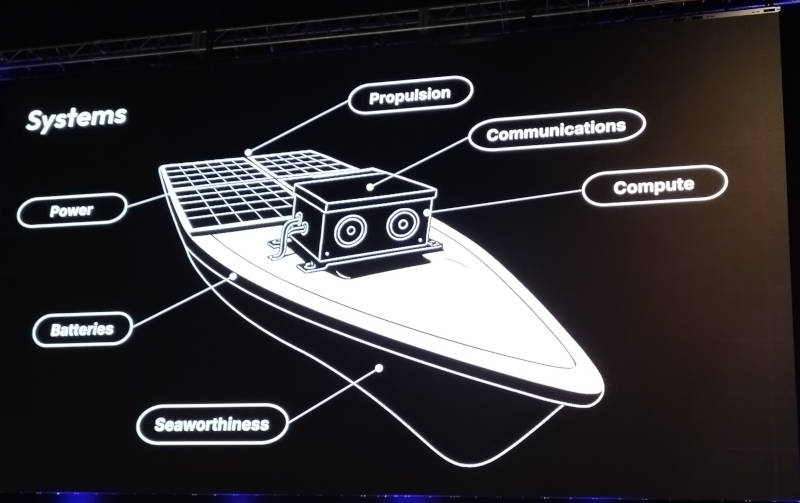
ボートの概要を説明
ここでは自走式のボートの概要を解説し、太陽光発電のパネルを後部に設置、中央にはStarlinkの衛星通信用のアンテナを装備したボックスが置かれ、そこにはカメラとRaspberry Piのコンピュータシステムが収められることになる。
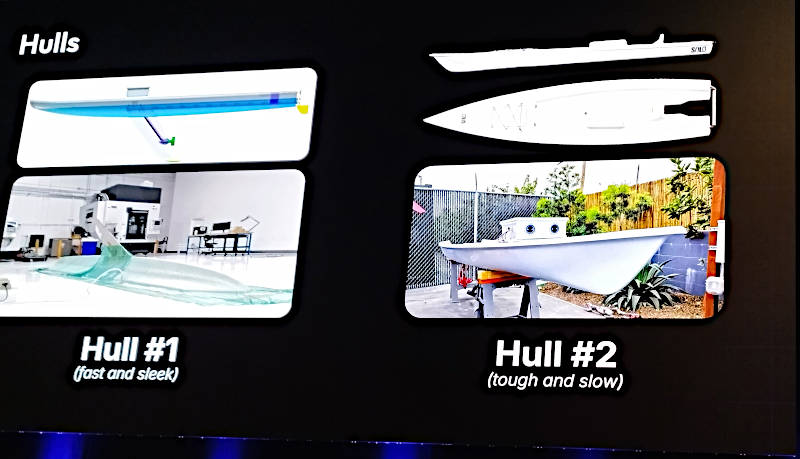
ボートのデザインは2種類。高速に移動できるデザインよりも遅くても丈夫なほうを選択
ボートデザインについても簡単に解説を行い、速度が出やすいデザインと速度は出ないが丈夫な構造の2種類が存在し、現在は丈夫なデザインを選択して実装が行われていると説明した。
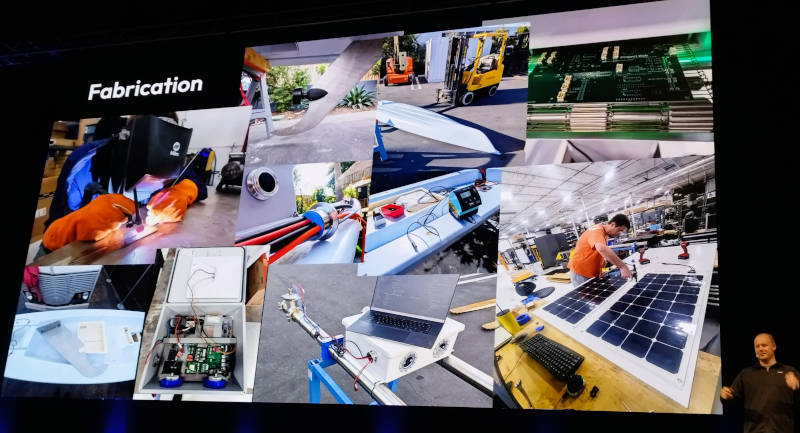
実際に組み立てている行程を写真で説明
設計から実装は数人で行っているとしてそのプロセスを写真で紹介した。
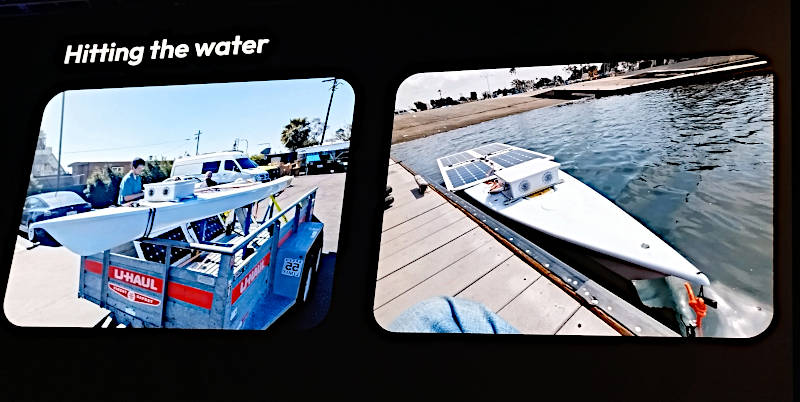
実際に水上で実験を行っているようす
このプロジェクトは、Grafana Labs以外にも多くのソフトウェアや企業に助けられているとロゴを配置したスライドで説明。中心にあるのは当然Grafanaのロゴだ。
多くのソフトウェア、ハードウェアによって実装されている自走式ボート
このプロジェクトのシステム構成を紹介。ここではボートに装備されているソフトウェアとバックエンドを担うGCPのソフトウェアスタックを解説した。
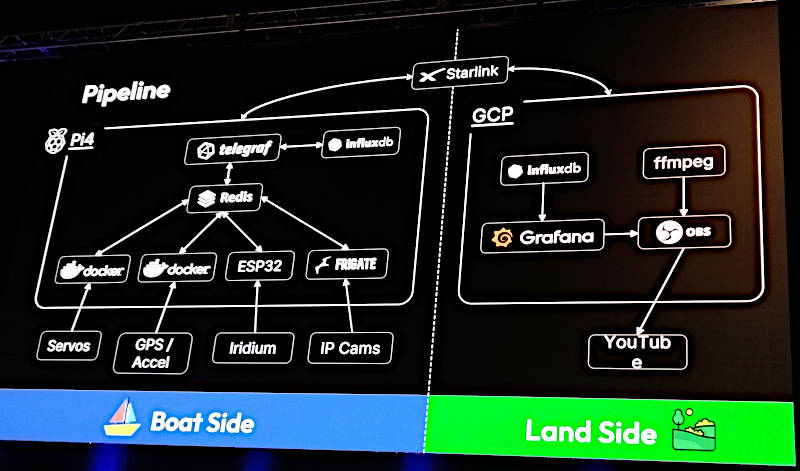
ボート側とバックエンドのクラウド側のソフトウェアを解説
ボートを駆動するモーターの制御、GPSデータの処理などにはDockerが用いられ、IPカメラによる物体認識、イリジウム衛星の捕捉などにはそれぞれ別のスタックが用意されていることなどが解説された。またクラウド側には収集したデータの可視化にGrafana、動画のエンコードとストレージとしてYouTubeが使われていることなどを説明した。ボートとクラウドの通信はStarlinkだ。コアのデータベースはRedisを使っている。
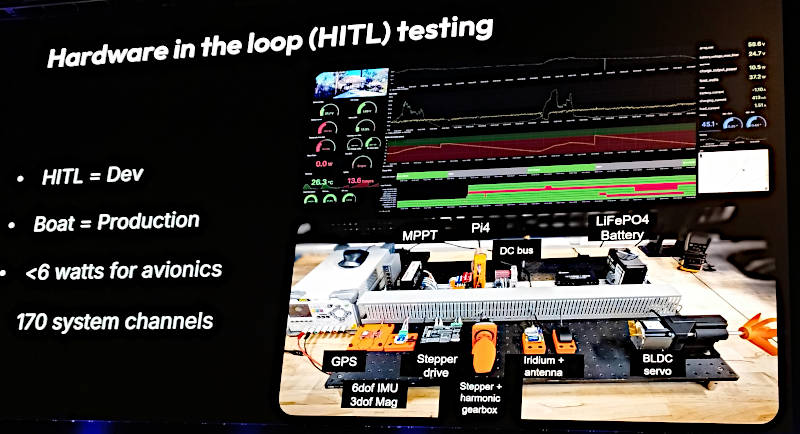
ボートに実装する前にシステムとして組み上げて実験を行っているようす
ここではボートにシステムを実装する前に、テストベッドのボード上にすべてのシステムを接続して検証を行っていることを説明した。すでにこの段階でGrafanaのダッシュボードが稼働していることがわかる。
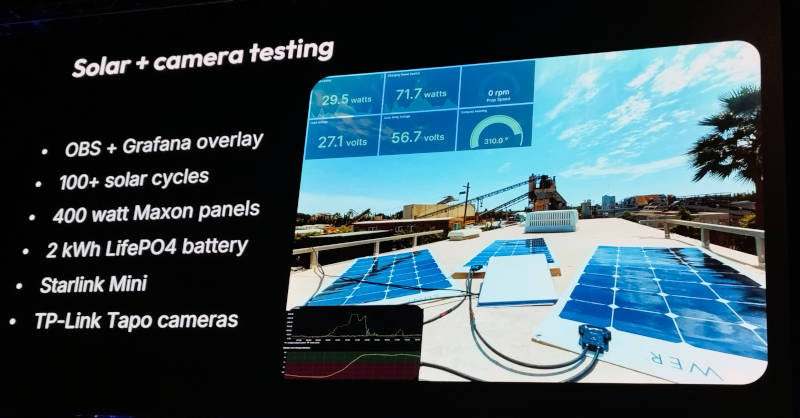
ボート駆動の原動力、ソーラーパネルとカメラのテストのようす
そしてこのシステムの原動力となるソーラーパネルとカメラの試験も、実際に海上で行っていることも説明された。ここでは発電のパネル、カメラ、バッテリー、Starlink Miniによる接続試験などが行われている。
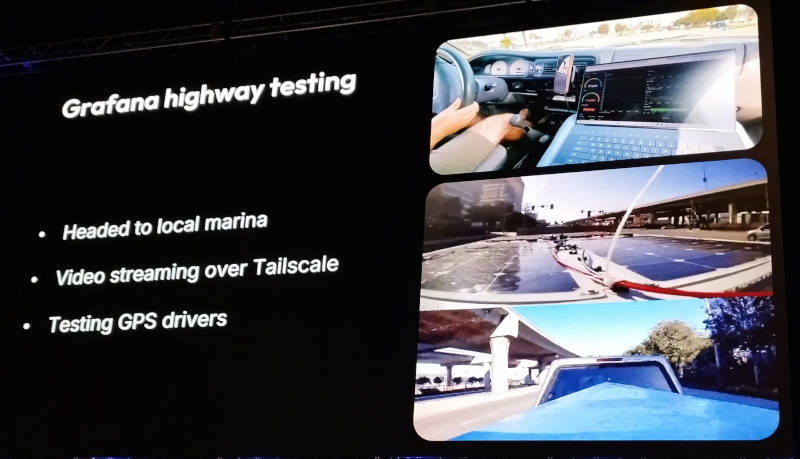
自動車にカメラを装着してライブストリーミングとGPS計測などをノートPC上のGrafanaで可視化する試験も行われた。実際に移動しながら動画のストリーミングと収集したデータをダッシュボードに表示するという方法だ

Project BobのGrafanaダッシュボード
このダッシュボードでは、操作のためのコントロールがiframeを使って組み込まれていることがわかる。データを可視化しながら即座に制御を行うことを一つのパネルで可能にしている。
実機をマリーナに浮かべてテストを実行
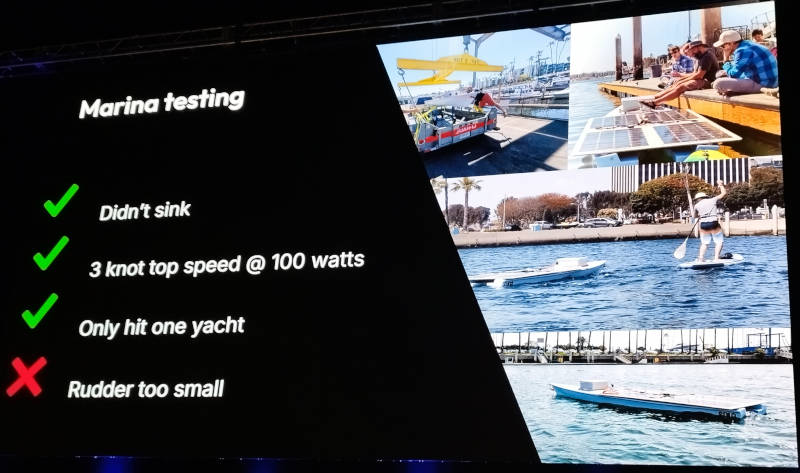
すべてのシステムを組み込んだ形でボートをマリーナに浮かべてテストを実施したことを説明。ここでは舵が小さ過ぎてボートの制御が難しかったことが反省点として挙げられている。McCalip氏はセッションの中でもQ&Aでも回答しているが、実際のところ、このボートは「大きなサーフボード」と表現したほうが実態に近いと語っている。「どうして帆を付けなかったのか? その方が速度を稼げるのに」という質問には、喜望峰の周りの海の荒さを考えるとなるべく外に露出する可動部を減らし、外的要因からの影響をなくしたかったと回答している。大きなサーフボードという形状も、風と波の影響を避けるための最適な選択ということだろう。
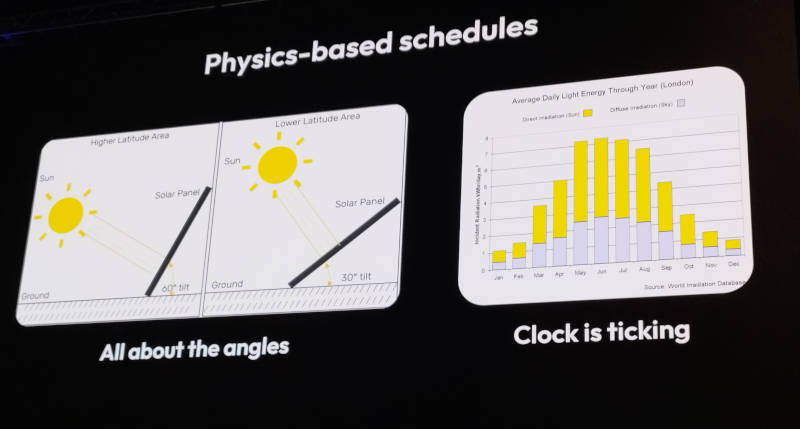
太陽光の角度と日照時間の関係から世界一周を実行できる期間は限られている
ここでは太陽の傾きと日照時間の関係から、この世界一周が遂行できる時間は限られていることを説明。太陽光から最大の発電効率を実現するためには角度が重要、また日照時間を計算すると実行できる期間は限られていることを説明した。ここではパネルに太陽光が当たる角度と時間を計算していることがわかる。当然、夜間や曇りの状態では発電効率が落ちることになり、ボートの動力が限られる状態では海流の影響を受けてしまうことも想定する必要があり、完全自走式による世界一周が難しい問題であることがわかる。
最後にProject Bobの公式ページとSNSのリンクを紹介してセッションを終えた。
●公式サイト:https://www.projectbob.xyz/
Grafanaのユースケースとしてはそれほどユニークとは言えなかったかもしれないが、ホビーで開発した無人の自走式デバイスをクラウド経由でモニタリングするという観点では参考になる内容だったと言える。エッジデバイスのオブザーバビリティとしてRaspberry Pi、Docker、Redis、Starlinkを使ってここまでできることを証明したという意味では大変参考になる内容だったと言える。


連載バックナンバー

Think ITメルマガ会員登録受付中
他にもこの記事が読まれています



全文検索エンジンによるおすすめ記事
- GrafanaCON 2025開催、最新のGrafana関連の情報を解説。キーノートから見るリアルな運用現場に対応したAIアシスタントとは?
- Observability Conference 2022から、サイボウズのオブザーバービリティ事例を紹介
- Oracle Cloud Hangout Cafe Season4 #4「Observability 再入門」(2021年9月8日開催)
- オブザーバビリティのNew Relicが発表した新機能についてCTOに詳細を訊く
- Promscaleのデモから見えるタイムシリーズデータを使った現代的なオブザーバビリティ
- Observability Conference 2022、利用者目線のオブザーバビリティ実装をドコモのSREが解説
- Microsoftがリードするモダンな分散システム用ランタイムDaprとは?
- Kubernetesアプリケーションのモニタリングことはじめ
- Observability Conference 2022、TVerによるNew Relic One導入事例を紹介
- KubeCon Europe 2025、DynatraceのDevRelにインタビュー。F1でも使われているオブザーバビリティとは?